
Background:
Elementary school letter grades theoretically indicate the achievement of a certain degree of competency in a subject (e.g. a fourth-grader receiving an “A” in math would have learned all of the math that a fourth-grader is expected to know).
The issue:
There are a couple of immediate problems with the way report cards present this information:
- There is pressure to assign a full range of grades across students; even in a theoretical world where all students in a class achieved all the expected proficiencies, there would be pressure on the teacher to further differentiate the students into “extremely proficient” (A), “basically the same but maybe missed a couple questions” (B), and “I guess mis-read a couple more questions” (C). But this is unfair to the students, who are all at more or less equivalent competency.
- By having the “A” and “F” be absolute maximum / minimum values, it’s unclear what competency a student actually has: a kindergartener would almost certainly get an “F” in a calculus class, but it would be easy for a reasonably competent calculus student to get that same “F” grade despite having a decent understanding of the material.
Finally, the current report card system presents knowledge as a “treadmill”: school just gets more and more difficult, until some students give up. This is not a reasonable way to depict the acquisition of knowledge, and gives an unintentional sense of futility to the whole educational endeavor.
Proposal:
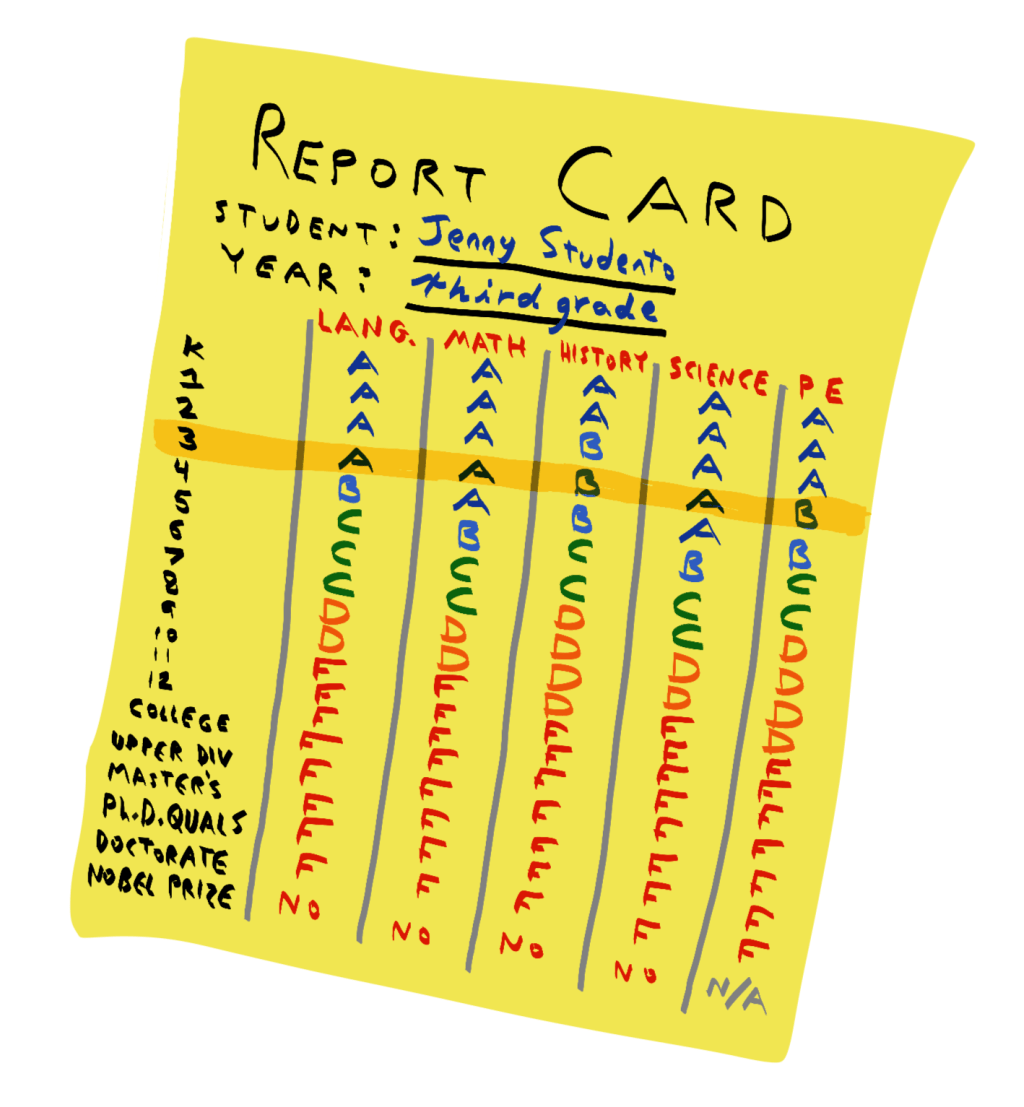
Instead of just showing how the student is faring in the current grade, the proposed new style of report card is “progression based” (Figure 1): it shows how the student is doing overall, on a spectrum ranging from kindergarten all the way through Nobel-Prize-worthy research.

This has at least two benefits:
- It allows a student to have the satisfaction of “locking in” some progress: rather than school being an endless treadmill of increasing difficulty, it becomes obvious that skills are accumulating. This might be motivational to a student who would otherwise give up upon getting a “D” in calculus.
- It prevents a straight-“A” student from losing motivation by incorrectly concluding that they have learned everything in the world, just because they’ve mastered the 3rd-grade curriculum.
Implementation Detail:
Actually implementing this sort of report card has at least one difficulty: how do you assess from a 4th-grade math test whether or not a student has learned college-level math?
One possible solution would be to add a few unreasonably-difficult questions to each test: for example, in the 4th-grader’s math test, a few calculus questions could be mixed in. If the student successfully answers these, they would get an “A” in the “Intro College Math” section of their report card, but if they don’t know the answer—as expected—this will not reduce their Grade 4 letter grade.
Conclusion:
There are probably other “gamification” techniques that could be used in grade reporting to motivate students more effectively, but this would be a good start.
PROS: Since humans apparently love to see progression occur / numbers go up (as evidenced by the popularity of many mobile games and of the entire RPG genre), this “progression system based” report card would definitely be a hit.
CONS: Extremely overbearing parents would probably berate their 2nd-graders for not getting the masters-degree-level science questions right, thus making the tiger-parent experience even more stressful.

You must be logged in to post a comment.